研究动态
Latest Research
npj Robotics · 2026.04
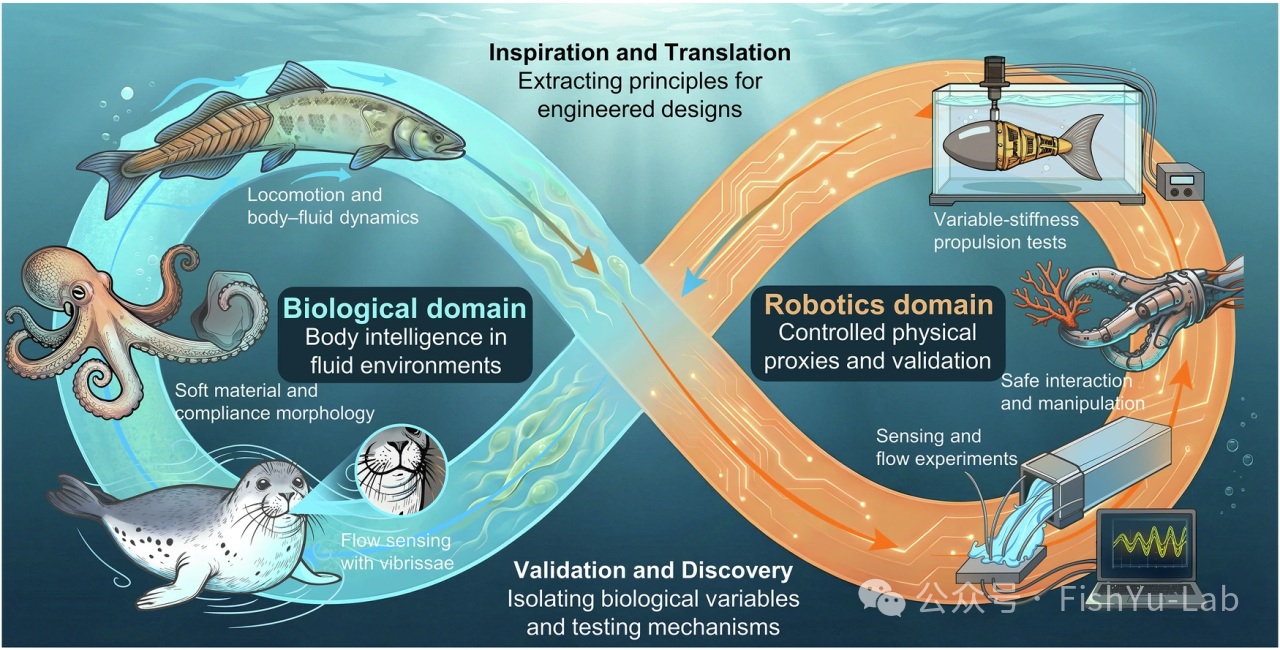
水下软体机器人综述发表于《npj Robotics》
系统梳理水下软体机器人的生物启发、结构设计与控制方法,并构建“从生物到机器人,再从机器人回到生物”的双向研究闭环。
CBS · 2026.02
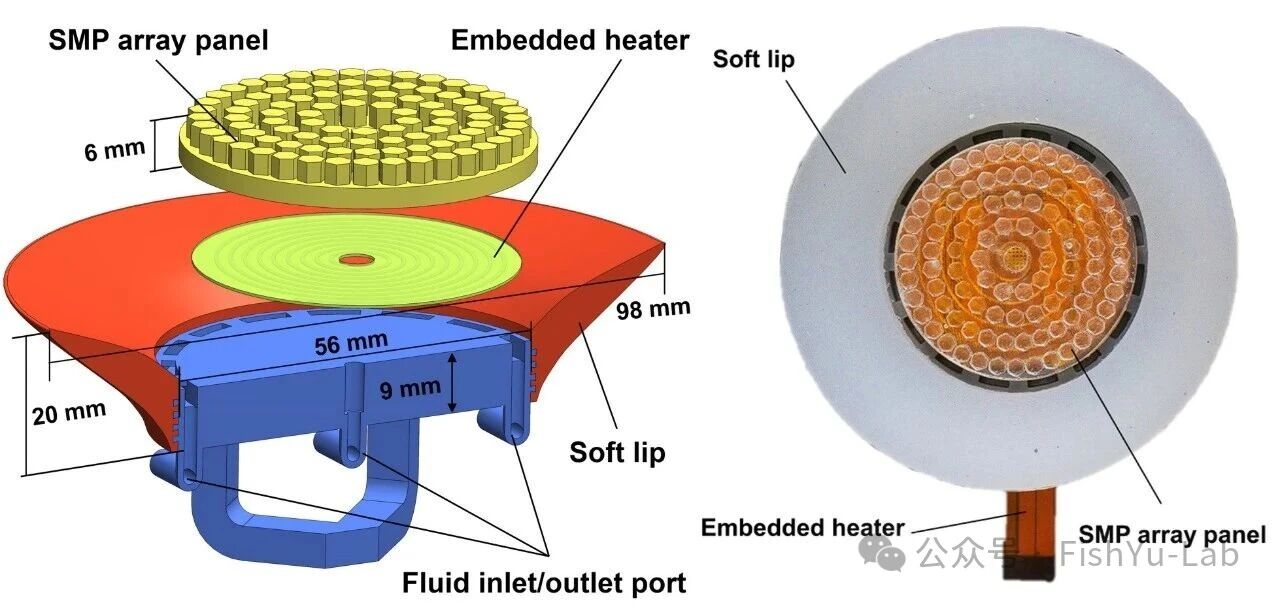
七鳃鳗启发两栖吸盘实现跨介质混合附着
通过形状记忆聚合物与柔性唇圈的协同设计,吸盘在空气与水下均可稳定工作,并显著增强对粗糙表面的适应能力。
Science Advances · 2026.01
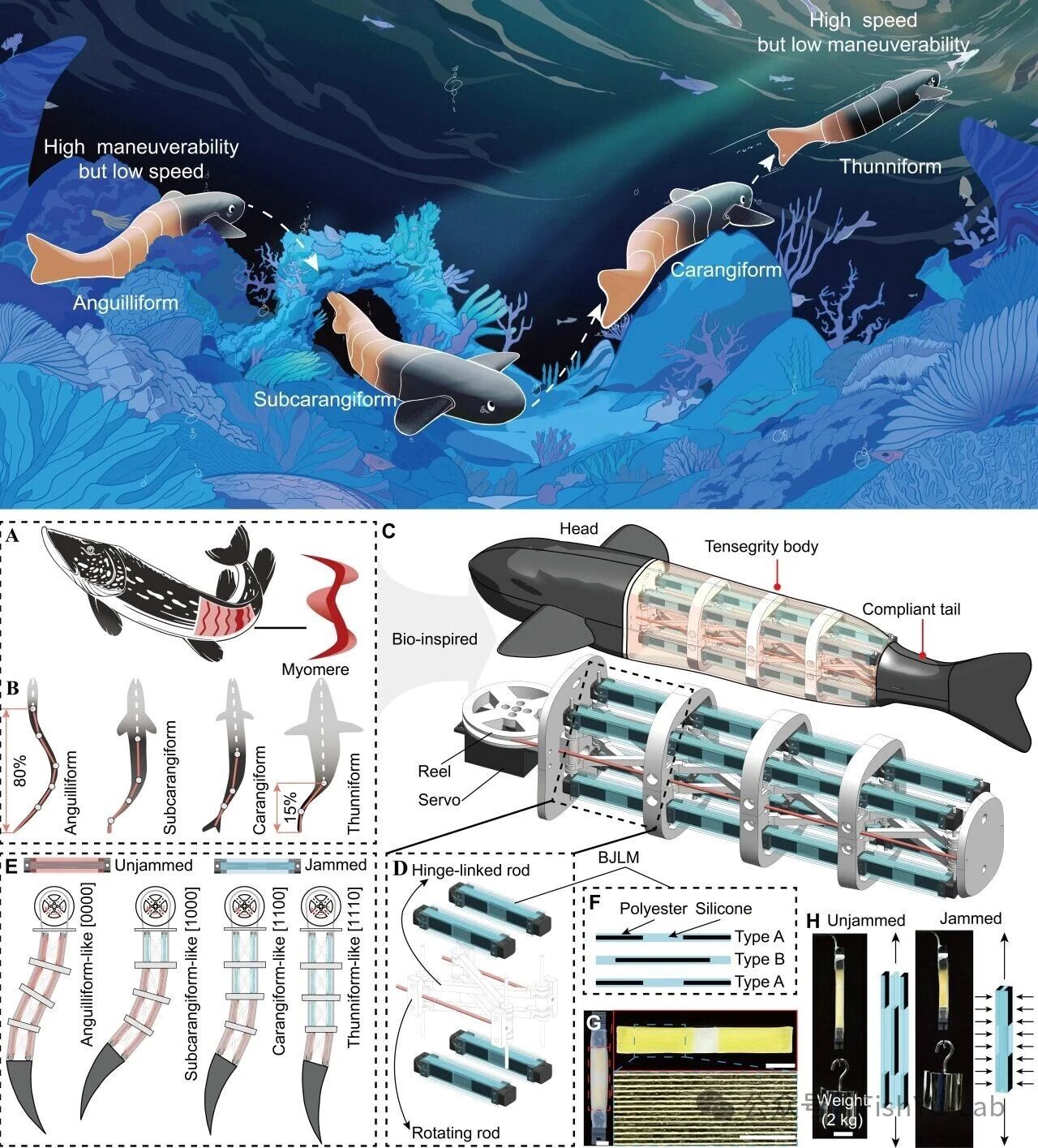
多模态软体机器鱼揭示鱼类高速与机动游动机理
可重构模块化软体机器鱼在鳗鲡科与金枪鱼模式间灵活切换,为解析鱼类高速推进、灵巧转向与模态协同提供统一平台。
Ocean Engineering · 2026.01
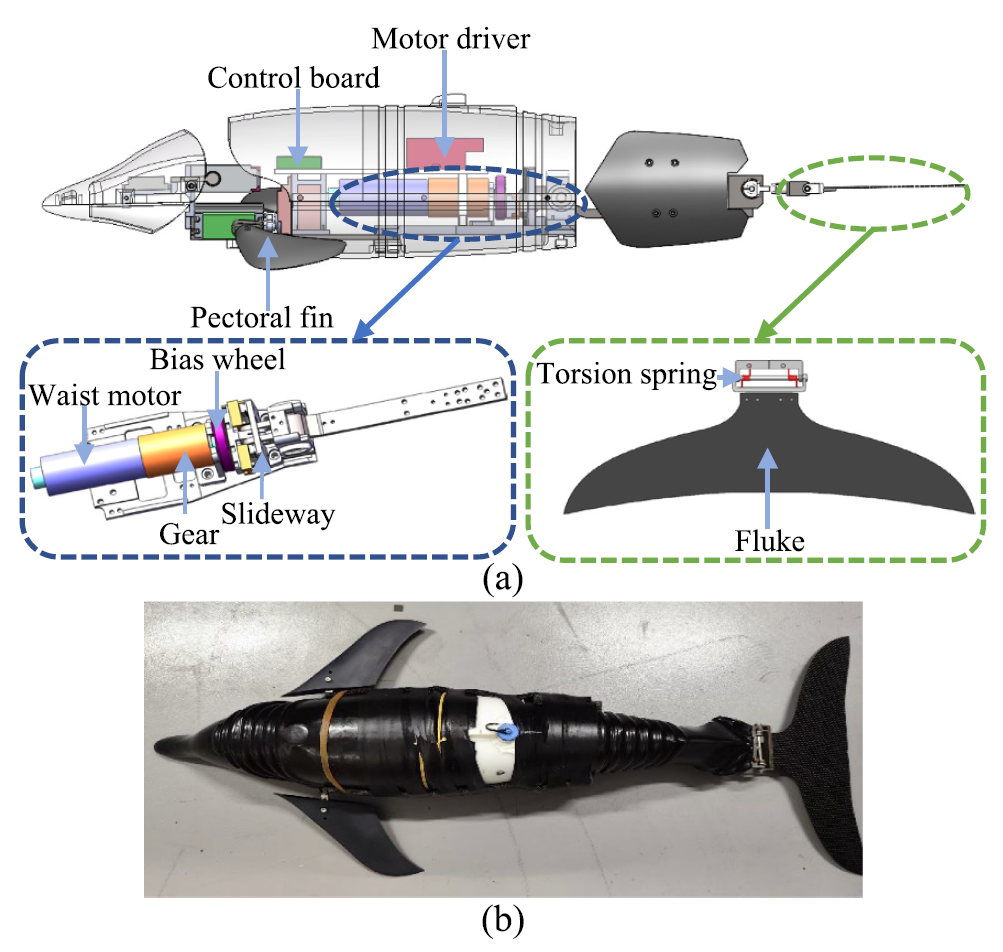
仿生机器海豚风险感知避障运动规划新进展
提出融合风险感知的安全增强型运动规划框架,显著提升机器海豚在障碍物密集环境中的避障能力与稳定性。
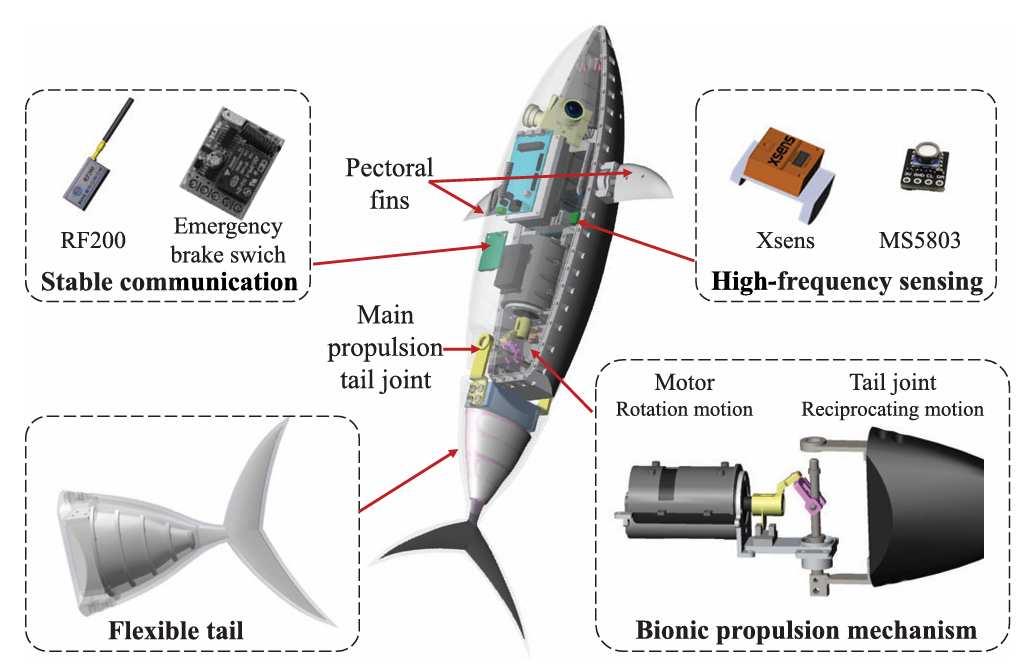
IEEE T-ASE · 2025.07
高速仿生机器金枪鱼的垂直面高精度运动控制
基于 NMPC 的综合解决方案攻克高速游动下垂直面失稳问题,兼顾深度保持精度与姿态调整敏捷性。
IEEE TII · 2025.05
新型旋转视觉雷达 ViDAR 与主动 SLAM 框架
受机械激光雷达启发构建旋转视觉系统,结合紧耦合里程计与强化学习主动控制,突破机器人视野局限。
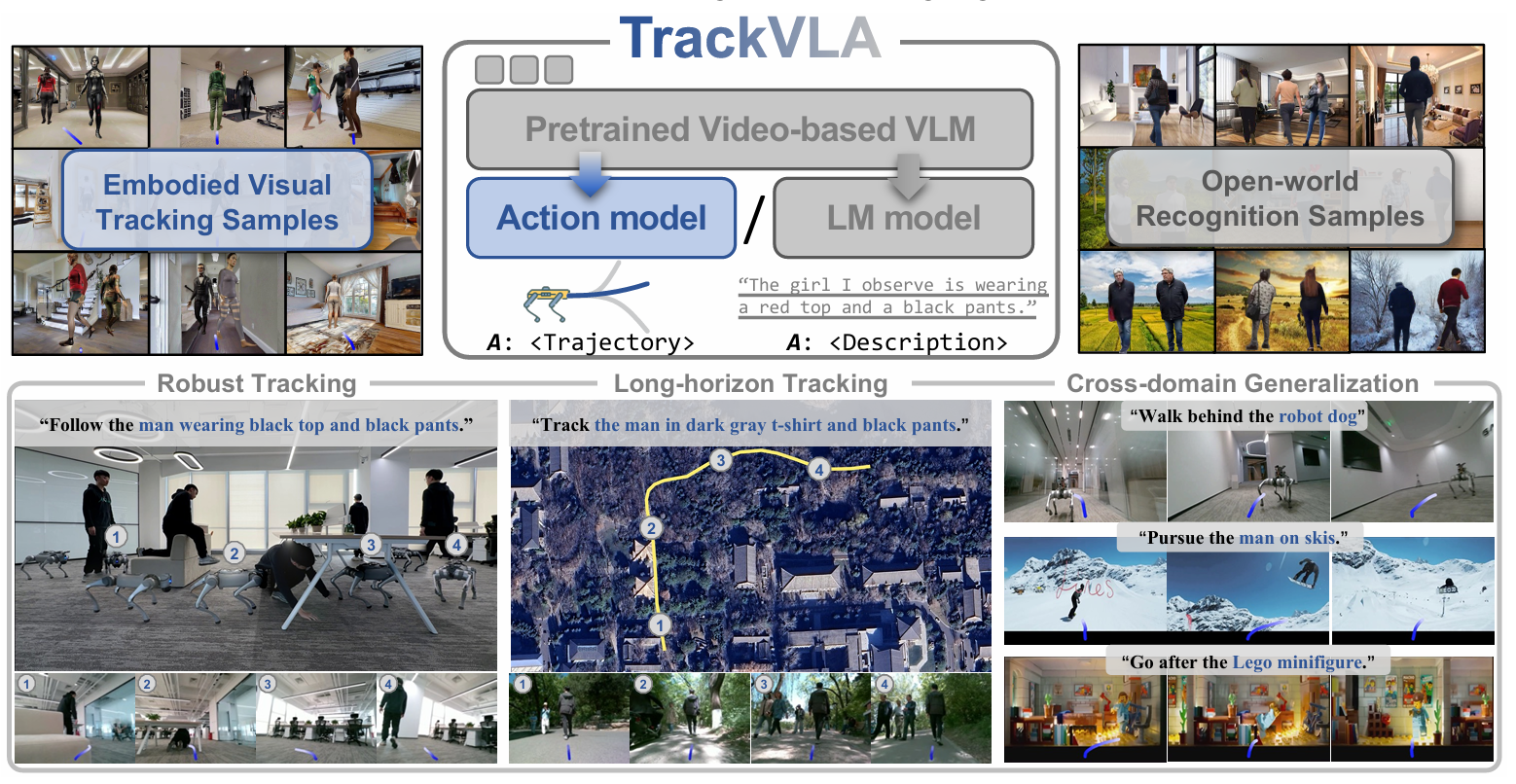
CoRL · 2025.05
TrackVLA:实现野外环境下的鲁棒目标跟随
提出具身视觉跟踪大模型 TrackVLA,在开放、动态与强遮挡环境下统一识别与规划,提升机器人自主跟随能力。
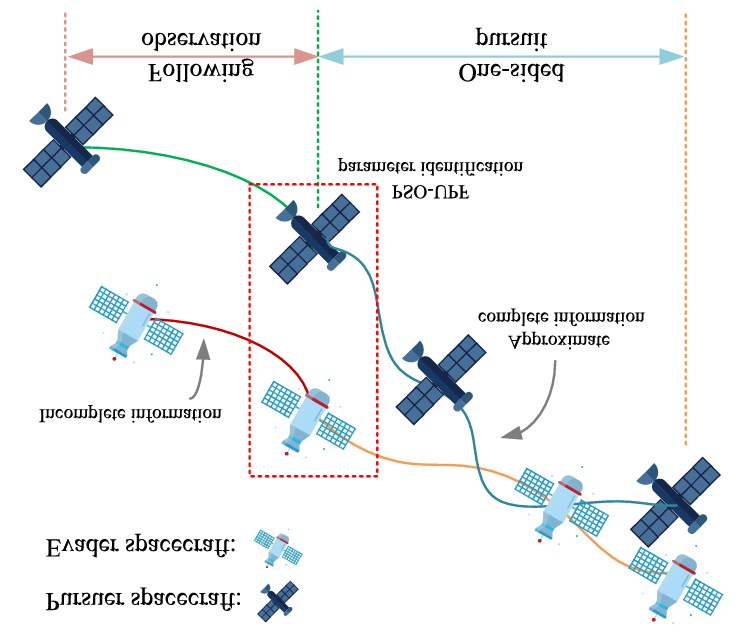
IEEE TCSI · 2025.04
非完全信息下考虑 J2 摄动的航天器博弈对抗新策略
提出“观测—估计—博弈”两阶段框架,提高追踪航天器在不确定环境下的对抗成功率。
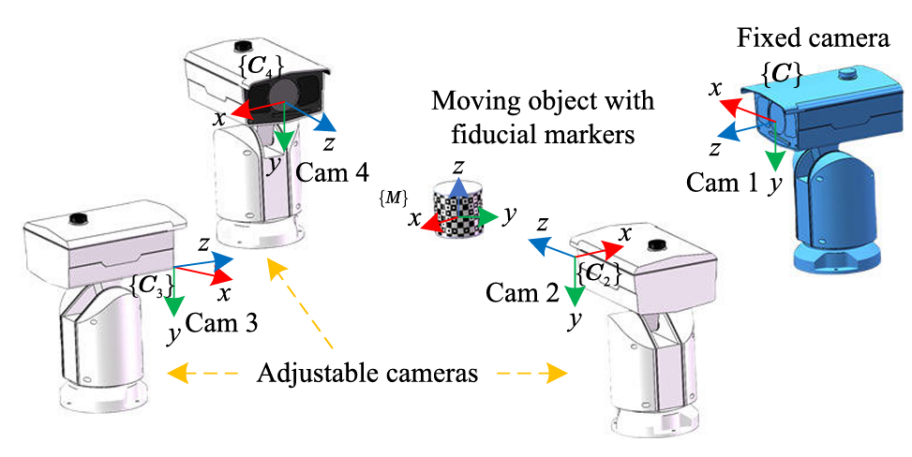
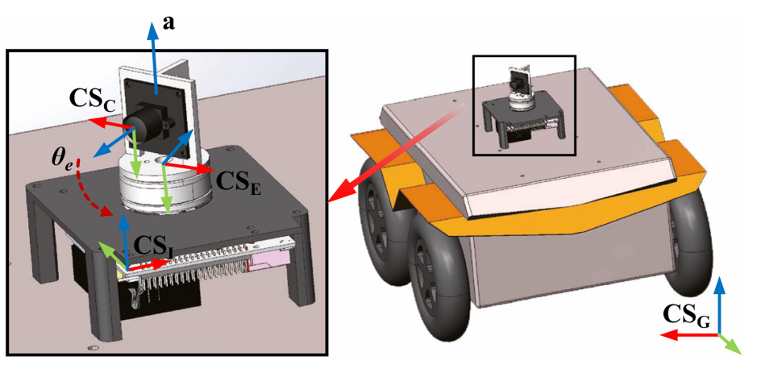
IEEE T-ASE · 2025.01
可动态调整的分布式多相机系统
结合云台动态调整与在线外参优化,提升大范围运动目标的鲁棒位姿估计能力。
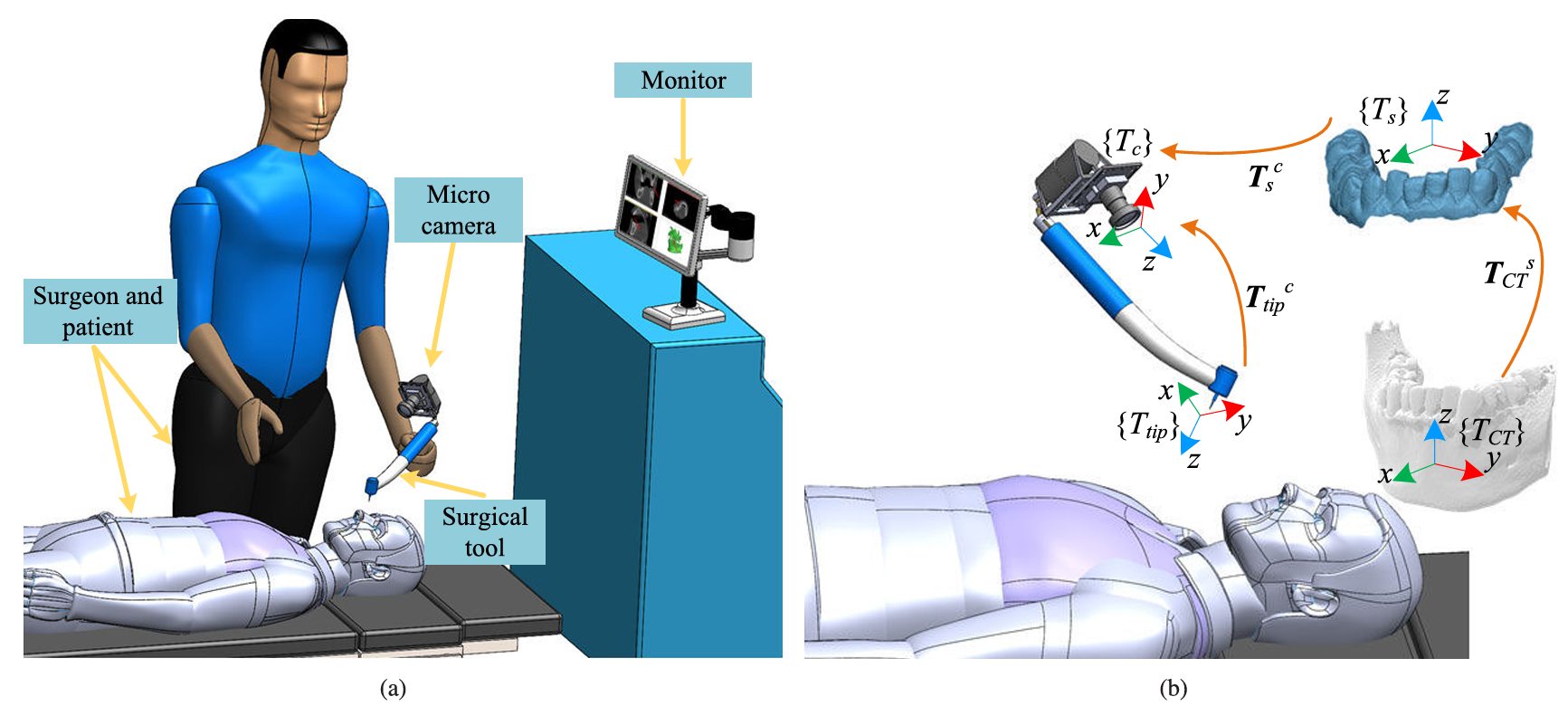
IEEE T-ASE · 2024.12
轻量化口腔手术导航系统:抗遮挡弱纹理精准定位
面向口腔颌面手术场景,提出单目微型相机与区域位姿跟踪方案,实现高精度动态配准。