北京大学机器智能实验室
Peking University Machine Intelligence Laboratory
实验室定位
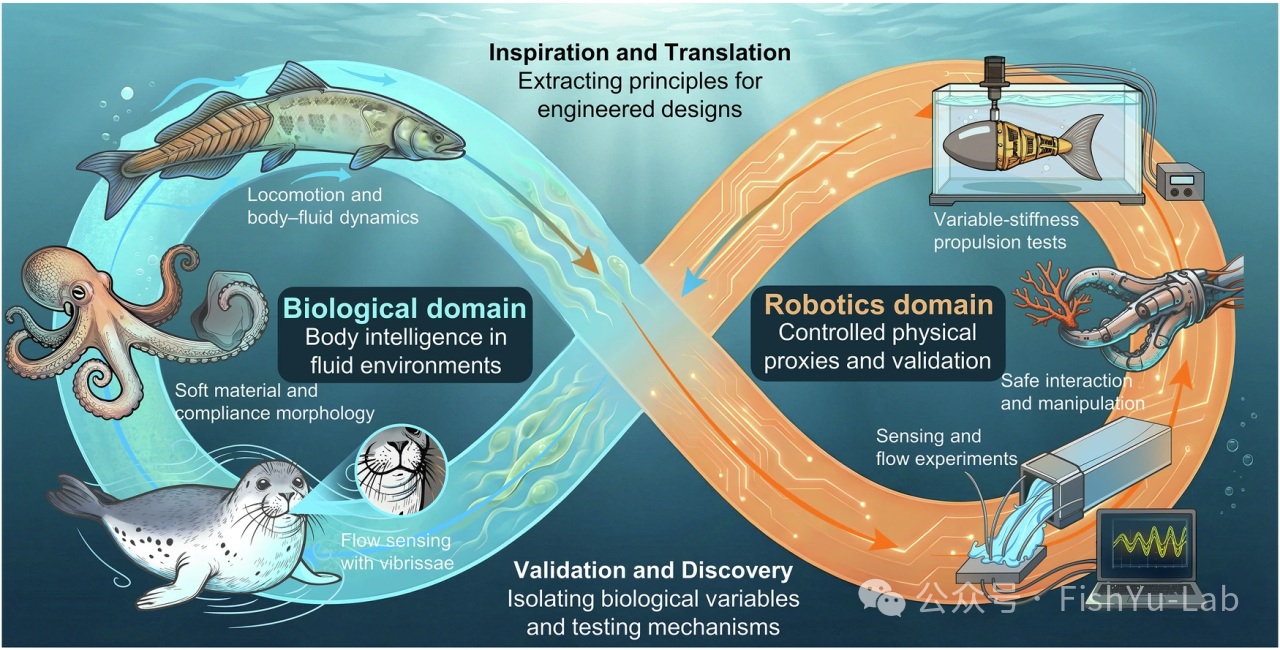
依托先进制造与机器人学院,以“探索智能机器前沿,赋能产业与社会发展”为使命,深耕水下仿生机器人、具身机器人、机器视觉及医疗手术机器人等前沿领域,开展跨学科创新研究。
团队构成
课题组由国家杰出青年科学基金获得者、IEEE Fellow 喻俊志教授领衔,孔诗涵和李磊老师带队,集结多名博士后、在读博士与硕士,形成富有创新活力的科研团队。
研究愿景
通过对自然生物运动机理的深度解析与工程化创新,突破水下机动、多机协同、医疗微创等技术瓶颈,以“仿生灵犀,智创未来”为愿景持续探索。
发展目标
实验室致力于打造在机器智能领域具有国际影响力的创新研究平台,通过原创性技术突破推动学科前沿发展,赋能产业转型升级,为构建智慧社会贡献力量。
研究方向
Research

仿生水下机器人
(Bio-inspired Underwater Robots)
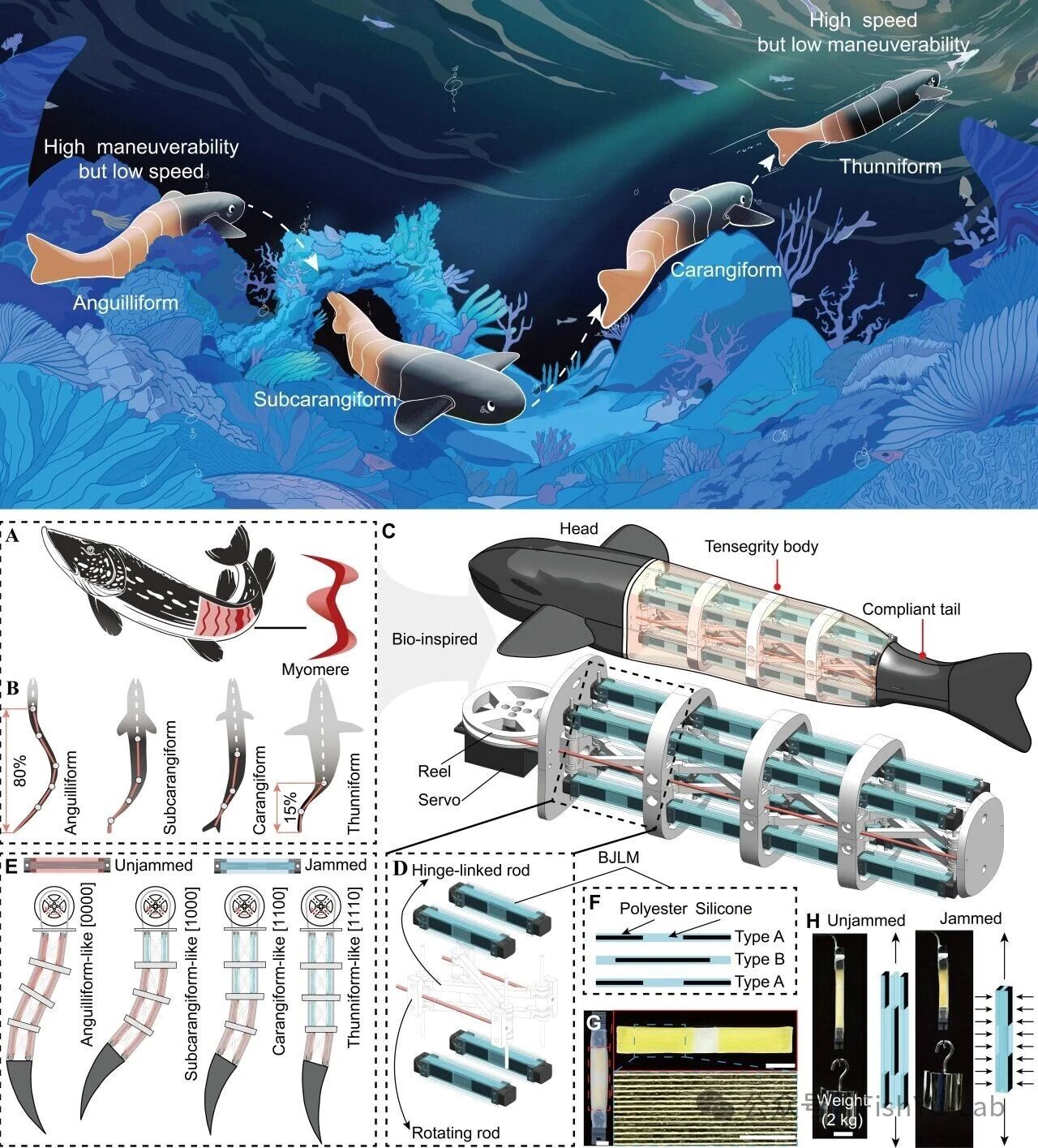
研发仿生机器海豚与机器金枪鱼,解决复杂动态环境下的感知与运动规划难题。
关键词:感知、高效推进、运动规划

具身智能与视觉感知
(Embodied AI & Visual Perception)
提出 TrackVLA 大模型与新型旋转视觉雷达(ViDAR),实现野外强遮挡环境下的鲁棒目标跟随与全向感知。
关键词:VLA大模型、记忆与推理模块
智能控制与博弈
(Intelligent Control & Game Theory)
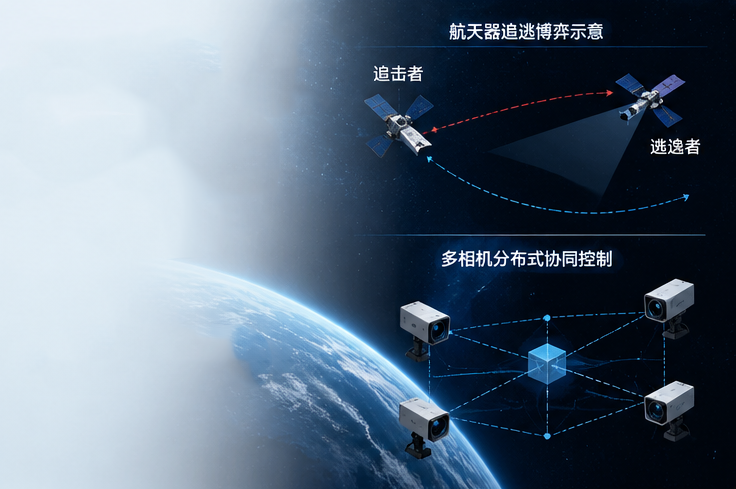
研究非完全信息下的航天器博弈对抗策略,以及多相机分布式协同控制,提升系统在不确定环境下的决策能力。

医疗机器人与导航
(Medical Robotics & Navigation)
开发手术导航系统,结合轻量化与抗遮挡设计,基于弱纹理特征实现精准定位,服务于口腔颌面手术等高精度医疗场景。
关键词:轻量化设计、抗遮挡、精准定位(弱纹理特征)
最新研究动态
Latest Research